Published On Sep 23, 2022
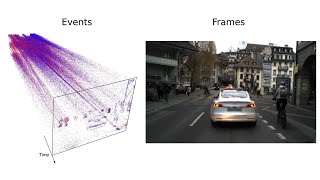
Due to their resilience to motion blur and high robustness in low-light and high dynamic range conditions, event cameras are poised to become enabling sensors for vision-based exploration on future Mars helicopter missions. However, existing event-based visual-inertial odometry (VIO) algorithms either suffer from high tracking errors or are brittle, since they cannot cope with significant depth uncertainties caused by an unforeseen loss of tracking or other effects. In this work, we introduce EKLT-VIO, which addresses both limitations by combining a state-of-the-art event-based frontend with a filter-based backend. This makes it both accurate and robust to uncertainties, outperforming event- and frame-based VIO algorithms on challenging benchmarks by 32%. In addition, we demonstrate accurate performance in hover-like conditions (outperforming existing event-based methods) as well as high robustness in newly collected Mars-like and high-dynamic-range sequences, where existing frame-based methods fail. In doing so, we show that event-based VIO is the way forward for vision-based exploration on Mars.
Reference:
Florian Mahlknecht, Daniel Gehrig, Jeremy Nash, Friedrich M. Rockenbauer, Benjamin Morrell, Jeff Delaune, Davide Scaramuzza
Exploring Event Camera-based Odometry for Planetary Robots
IEEE Robotics and Automation Letters (RA-L), 2022, Kyoto, Japan
PDF: https://rpg.ifi.uzh.ch/docs/RAL22_Mah...
Code & Dataset: https://github.com/jpl-x/x_evaluate
Dataset: https://uzh-rpg.github.io/eklt-vio/
Our research page on event-based vision: http://rpg.ifi.uzh.ch/research_dvs.html
Our research on visual odometry and SLAM: https://rpg.ifi.uzh.ch/research_vo.html
For event-camera datasets, see here:
1. https://dsec.ifi.uzh.ch/
2. http://rpg.ifi.uzh.ch/davis_data.html
3. https://github.com/uzh-rpg/event-base...
For an event camera simulator: http://rpg.ifi.uzh.ch/esim
For a survey paper on event cameras, see here:
https://rpg.ifi.uzh.ch/docs/EventVisi...
Other resources on event cameras (publications, software, drivers, where to buy, etc.):
https://github.com/uzh-rpg/event-base...
Affiliation:
F. Mahlknecht, J. Nash, F. M. Rockenbauer, B. Morrell and J. Delaune are
with the Jet Propulsion Laboratory, California Institute of Technology, USA.
D. Gehrig, and D. Scaramuzza are with the Robotics and Perception Group, Dept. of Informatics, University of Zurich, and Dept. of Neuroinformatics, University of Zurich and ETH Zurich, Switzerland http://rpg.ifi.uzh.ch/