Published On May 15, 2023
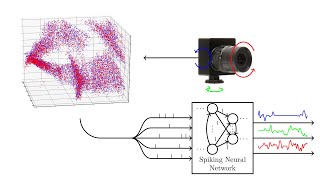
Recently, neural control policies have outperformed existing model-based planning-and-control methods for autonomously navigating quadrotors through cluttered environments in minimum time. However, they are not perception aware, a crucial requirement in vision-based navigation due to the camera's limited field of view and the underactuated nature of a quadrotor. We propose a method to learn neural network policies that achieve perception-aware, minimum-time flight in cluttered environments. Our method combines imitation learning and reinforcement learning (RL) by leveraging a privileged learning-by-cheating framework. Using RL, we first train a perception-aware teacher policy with full-state information to fly in minimum time through cluttered environments. Then, we use imitation learning to distill its knowledge into a vision-based student policy that only perceives the environment via a camera. Our approach tightly couples perception and control, showing a significant advantage in computation speed (10x faster) and success rate. We demonstrate the closed-loop control performance using a physical quadrotor and hardware-in-the-loop simulation at speeds up to 50 km/h.
Reference:
Y. Song*, K. Shi*, R. Penicka , D. Scaramuzza
"Learning Perception-Aware Agile Flight in Cluttered Environment"
IEEE International Conference on Robotics and Automation (ICRA), 2023
PDF: https://arxiv.org/abs/2210.01841
For more information about our research, visit these pages:
1. Agile Drone Flight: https://rpg.ifi.uzh.ch/aggressive_fli...
2. Machine Learning: https://rpg.ifi.uzh.ch/research_learn...
3. Vision-based Navigation for Micro Aerial Vehicles (MAVs): https://rpg.ifi.uzh.ch/research_mav.html
4. Active Vision and Exploration: https://rpg.ifi.uzh.ch/research_activ...
Affiliations:
Y. Song, K. Shi, D. Scaramuzza are with the Robotics and Perception Group, Dep. of Informatics, University of Zurich, and Dep. of Neuroinformatics, University of Zurich and ETH Zurich, Switzerland: https://rpg.ifi.uzh.ch/
R. Penicka is with the Multi-robot Systems Group, Czech Technical University in Prague, Czech Republic.
Music Credits: Epic Inspiration from AShamaluevMusic