Published On Apr 26, 2023
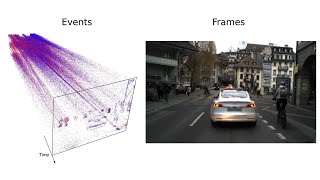
Because of their high temporal resolution, increased resilience to motion blur, and very sparse output, event cameras have been shown to be ideal for low-latency and low-bandwidth feature tracking, even in challenging scenarios. Existing feature tracking methods for event cameras are either handcrafted or derived from first principles but require extensive parameter tuning, are sensitive to noise, and do not generalize to different scenarios due to unmodeled effects. To tackle these deficiencies, we introduce the first data-driven feature tracker for event cameras, which leverages low-latency events to track features detected in a grayscale frame. We achieve robust performance via a novel frame attention module, which shares information across feature tracks. By directly transferring zero-shot from synthetic to real data, our data-driven tracker outperforms existing approaches in relative feature age by up to 120% while also achieving the lowest latency. This performance gap is further increased to 130% by adapting our tracker to real data with a novel self-supervision strategy.
Reference:
Nico Messikommer*, Carter Fang*, Mathias Gehrig, Davide Scaramuzza
Data-driven Feature Tracking for Event Cameras
IEEE Conference of Computer Vision and Pattern Recognition (CVPR), 2023, Vancouver , CA
PDF: https://rpg.ifi.uzh.ch/docs/CVPR23_Me...
Code: https://github.com/uzh-rpg/deep_ev_tr...
Our research page on event-based vision: http://rpg.ifi.uzh.ch/research_dvs.html
For event-camera datasets, see here:
1. https://dsec.ifi.uzh.ch/
2. http://rpg.ifi.uzh.ch/davis_data.html
3. https://github.com/uzh-rpg/event-base...
For an event camera simulator: http://rpg.ifi.uzh.ch/esim
For a survey paper on event cameras, see here:
https://rpg.ifi.uzh.ch/docs/EventVisi...
Other resources on event cameras (publications, software, drivers, where to buy, etc.):
https://github.com/uzh-rpg/event-base...
Affiliation:
N. Messikommer, C. Fang, M. Gehrig, and D. Scaramuzza are with the Robotics and Perception Group, Dept. of Informatics, University of Zurich, and Dept. of Neuroinformatics, University of Zurich and ETH Zurich, Switzerland http://rpg.ifi.uzh.ch/