Published On Feb 16, 2022
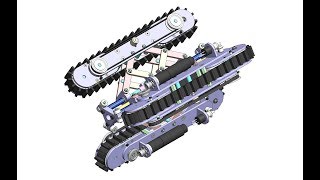
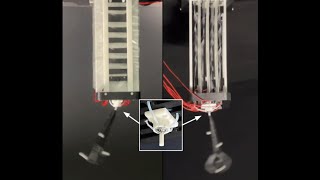
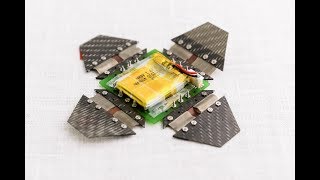
We present a novel dynamic gait to control in-plane locomotion (forward, back, clockwise and counter clockwise rotations) of a compliant legged hexapedal robot using a single actuator. The gait exploits the compliance disparity between alternate stance tripods, to generate rotation by controlling the acceleration of the robot. Zarrouk and Fearing ( IEEE ICRA June 2014)
show more