Published On Apr 14, 2024
EEWOC: Extended-reach Enhanced Wheeled Orb for Climbing
Our modern world is filled with many large vertical structures, including towers, factories, bridges, power stations, and ships. These vital pieces of infrastructure require regular inspections and maintenance to ensure safety, but can be dangerous for humans. Climbing robots can be deployed to help protect human inspectors from electrical, chemical, and fall hazards, and can help automate these tedious and labor-intensive tasks. Existing climbing robots generally use wheeled locomotion, which offers poor adaptability and cannot overcome small features, or legged movement, which are often slow and bulky due to their overly complex designs that mimic ground-based animals and manipulator arms.
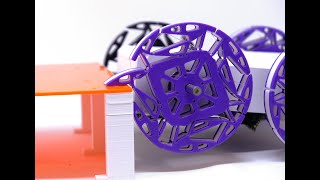
EEWOC uses a unique locomotion scheme to climb complex steel structures with its magnetic grippers. Its lightweight and highly extendable tape spring limb can reach over 1.2m, allowing it to traverse gaps and obstacles much larger than other existing climbing robots. Its ability to bend allows it to reach around corners and over ledges, and it can transition between surfaces easily thanks to assistance from its wheels. The wheels also let it to drive more quickly and efficiently on the ground. These features make EEWOC well-suited for climbing the complex steel structures seen in real-world environments.
EEWOC fits within a 260mm diameter sphere and weighs only 2.1kg. It can travel at 0.24m/s (0.79 ft/s) or around 0.9 bodylengths/s, making it one of the fastest climbing robots. It can also lift 3.4kg with a payload-to-weight ratio of 1.62, also making it one of the strongest. Its long limb length helps simplify the process of identifying suitable grasping points and coordinating limbs, steps which cause other legged climbing robots to be very slow. EEWOC represents a minimalist morphology that reduces the actuators and structures necessary for climbing, using passive, compliant, and switchable mechanisms.
For more information, see our published works:
ASME-IDETC 2023: A Lightweight Mobile Robot for Climbing Steel Structures With An Extending and Bending_Tape Spring Limb
https://asmedigitalcollection.asme.or...
ASME Journal of Mechanisms and Robotics 2023: Extending and Bending Robotic Limbs Using Tape Springs for Mobility and Manipulation: Preliminary Investigations
https://asmedigitalcollection.asme.or...
Contact:
Justin Quan ([email protected])
Dennis Hong ([email protected])