Published On Dec 28, 2015
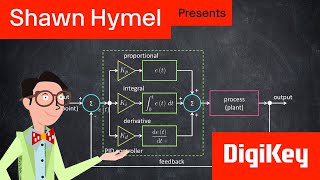
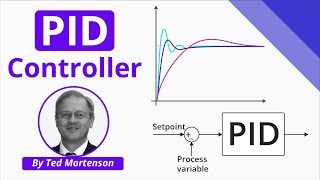
The demonstration in this video will show you the effect of proportional, derivative, and integral control on a real system. It's a DC motor connected to an optical rotary encoder (quadrature) and is controlled by a digital control loop implemented on a TI Launch Pad MSP432. It uses a series of timers and interrupts to generate the PWM signals to the H-Bridge motor driver, read the pulses from the encoder, and calculate the control effort using a PID control algorithm. It also implements an anti-windup algorithm to improve the system stability since this is a real system and the motor saturates easily.
If you listen, you can hear the PWM signal whine as it adjust the current to the motor. When I push on the flag with my hand you will hear it go quiet. That's when the PWM is at 100% duty cycle and the audible PWM AC current going to the motor is now DC.
Post a comment if you liked the video!
You can download the code, design files, and parts list here:
https://github.com/arduinoNube/digita...
(out of date: https://sourceforge.net/projects/digi... )
Enjoy!
http://www.gregoryholst.com