Published On Jun 6, 2022
[Correction]
Page 12: the caption of the right bottom video should be "high speed".
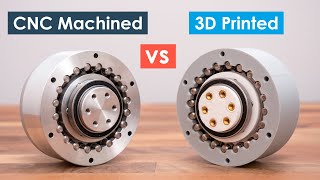
This video shows a robotic arm using low friction and high accuracy geared motors. Reducers installed in conventional industrial robots are designed to have a low backlash of approximately 3 arcmin (0.05 degree) or less to suppress lost motion. However, the joints of the robot are stiff, and thus it is difficult to backdrive by a small external force. This problem limits applications of existing industrial robots, particularly for tasks that require mechanical contact between the robot and the external environment. Although a low friction geared motor constitutes a possible solution, backlash leads to an increase in lost motion. Therefore, this study presents a combination of electric motor and cycloidal drive with a 20:1 reduction ratio, 1 arcmin of backlash, and low backdrive torque (low friction) of 1 Nm. Experiments verify position and orientation repeatability, as well as force accuracy, estimated from the motor-current based joint torque.
2022 IEEE/SICE International Symposium on System Integration (SII)
https://ieeexplore.ieee.org/document/...